Come and see our latest projects at the OSS Capstone Fair

Our team is creating a real-time hand recognition system capable of controlling a car stereo based on user hand poses. With this system, the driver can change the song, change the volume, and much more, without taking their eyes off the road!

Our project's goal is to remove false positives, or misidentifications from object detection algorithms. To accomplish this, our team is working with object detection architectures and models by Ultralytics, YOLOv5, which is pretrained on the COCO dataset. Further developments with include tests using our own developed models
Our team has worked with the NRC to research and create this Stable Satellite Tracking System for Laser Satellite-to-Ground Optical Communications. Read more about our goals, additional background information, project development, and watch our demonstration to gain a better understanding of this project.
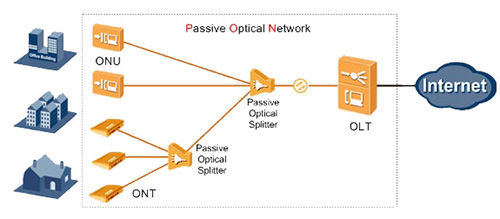
The goal of our capstone project is to work alongside representatives from TELUS to put together a small PON lab using PON devices from two different vendors and standardize their features so that they operate in the same manner, allowing them to operate together in a passive optical network.

The project will be able to detect objects using thermal imaging in real time, with the use of the Nvidia Jetson platform. This platform will allow us the use of a small, portable and fast board, to attach our thermal camera to it, and process real time data with our detector. We are using the Nvidia Jetson platform over other embedded computing boards, because of their native specialization in AI applications.
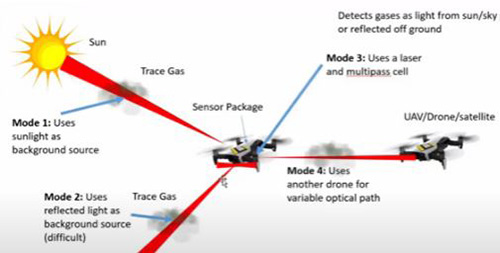
Our objective is to design, build and develop a drone-to-drone optical signal communication system. The primary goal is to allow for drone-to-drone communication using an optical signal that transmits from one autonomous drone to another. This is done by transmitting a signal via a laser from one drone to another drone that has a photodiode that is prepared to receive the signal.